- Published on
【地图算法】判断点位与曲线是否重合
- Authors

- Name
- 国Wei
- @ygweric
在开源一个日赚5毛的小程序【北漂开车指南】,欢迎star 中,有很多值得研究的算法,这里想分享一下。
相关实践在开源项目微信小程序:查看进京证摄像头分布和信息,智能规划线路,避让摄像头,适合短距离出行中有使用。
这个小程序的主要算法点是:判断摄像头点位是否在导航线路之上,也就是判断摄像头点位是否和线路重合
这里有几个前置情况需要说明下:
- 目前小程序的摄像头点位有5000+,每个摄像头对应一个二维的经纬度点位。数据结构如下
export type Location = {
longitude: number;
latitude: number;
};
- 导航线路,是通过调用高德接口返回的,返回的数据格式是n个二位的点,组成的折线(线段),如下图,原始数据并不是一个或者多个封闭的多边形。

- 高德的原始数据如下
"tmc_polyline": "116.408477,40.06518;116.408525,40.0651;116.408627,40.065041;116.408718,40.065041;116.408799,40.065078"
实际使用中,我将其映射为简单的经纬度数组,可以理解为 Array<Location>,如下:
[{"longitude":116.408477,"latitude":40.06518},
{"longitude":116.408525,"latitude":40.0651},
{"longitude":116.408627,"latitude":40.065041},
{"longitude":116.408718,"latitude":40.065041},
{"longitude":116.408799,"latitude":40.065078},
{"longitude":116.408799,"latitude":40.065078},
{"longitude":116.409287,"latitude":40.064719},
{"longitude":116.409287,"latitude":40.064719},
{"longitude":116.409314,"latitude":40.065207},
{"longitude":116.409314,"latitude":40.065207}]
- 高德提供线路避让的接口,避让参数需要是多边形,不可以是二维点, 文档在这里, 参数字段是avoidpolygons
avoidpolygons
区域避让,默认支持1个避让区域,每个区域最多可有16个顶点;多个区域坐标按顺序以英文竖线符号“|”分隔,如果是四边形则有四个坐标点,如果是五边形则有五个坐标点;最大支持32个避让区域。同时传入避让区域及避让道路,仅支持避让道路;每个避让区域不能超过81平方公里,否则避让区域会失效。
所以,我们要
- 判断并标记出摄像头(二维点位),是否与导航的线路(二维点位数组(无宽度折线))有重合。
- 将重合的点位转换为面,传给高德api。
我们先尝试解决第一个问题:
判断并标记出摄像头是否与导航的线路有重合
当然,只判断点位和曲线是否重合,和简单,这里不描述,可以直接问大模型。
在实际业务中, 摄像头位置会有误差(网友上报提供),导航的无宽度折现,也无法覆盖实际宽两三米的道路,所以,我们需要(方案二选一)
- 将摄像头扩展为一个具有面积的正方形,正方形的宽度可以配置,在进行点位重合测试的时候选择合适的精度。当然,也可以扩展成圆、菱形、五角星、三角形、可以自由探索~。
- 将线路的“无宽度折线”,扩展为有宽度的折线,这个比较复杂,也走了弯路,一会细说。
我当时选择了第二种,估计当时脑子没有反应过来,直接忘记了第一种~
将线路的“无宽度折线”,扩展为有宽度的折线
方案v1, 有bug
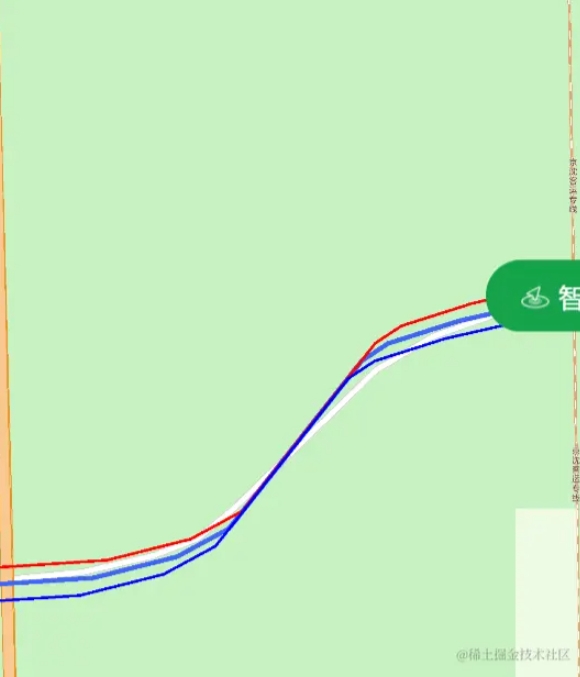
当时我想着直接将经纬度都加减10,得到一个误差,初期结果如下,效果看着不错。 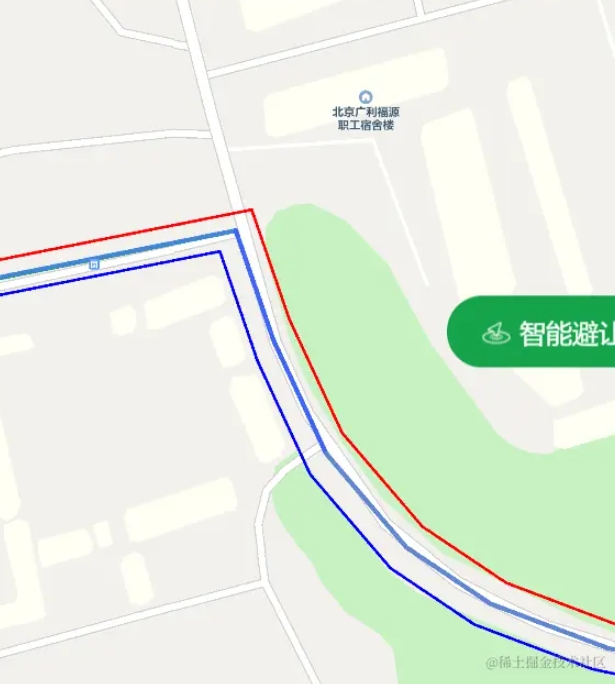
但测试多了,就发现有问题,在垂直、水平的路线中,显示良好,但在45度倾斜的情况下,回显示,如图:

v1代码可以在 https://github.com/ygweric/jinjing-route-plan-mp-opensource/tree/expandLineV1 的expandLineV1分支的src\pages\route\index.vue文件中查看
方案v2,用起来效果不错(目前线上版本的方案)
意识到自己的错误后,我发现进入了自己的知识盲区,好像很复杂的样子。
但是我们有GPT,直接开文,在经历过ChatGPT、文心一言、通义千问等来回对比测试,改进提问后,终于得到了正确答案。
大概原始是先计算每跟线段的法线,在再法线的方向上向两个方向同时扩展线段。
先看下效果,截图是和方案一错误效果对应的位置对比图:



可以看到,这次折线扩充的就很丝滑了,虽然转折处有一些缝隙,但已经无伤大雅了,上代码:
/**
* 该函数用于将一条由多个点组成的线向外扩展指定宽度,生成一个新的多边形。
* 如果给定的点数量少于2个,则会抛出错误。
* 函数内部通过计算向量方向和角度,然后向外扩展得到新的点。
* 最后,将所有扩展点连接起来形成一个多边形,并闭合回到起点。
* 扩展线条为某个宽度的带状
* @param points
* @param width
* @returns
*/
export function expandLineWithWidth(points: Point[], width: number): Point[] {
if (points.length < 2) {
throw new Error('至少需要两个点来定义一条线');
}
// 计算向量方向并外扩得到新点
function getExpandedPoints(point1: Point, point2: Point, widthHalf: number): Point[] {
const dx = point2.longitude - point1.longitude;
const dy = point2.latitude - point1.latitude;
const length = Math.sqrt(dx ** 2 + dy ** 2);
const angle = Math.atan2(dy, dx); // 获取当前线段的角度
// 外扩向量
const offsetVector1 = { longitude: point1.longitude + widthHalf * Math.cos(angle - Math.PI / 2), latitude: point1.latitude + widthHalf * Math.sin(angle - Math.PI / 2) };
const offsetVector2 = { longitude: point2.longitude + widthHalf * Math.cos(angle - Math.PI / 2), latitude: point2.latitude + widthHalf * Math.sin(angle - Math.PI / 2) };
return [offsetVector1, offsetVector2];
}
const halfWidth = width / 2;
let polygonPoints: Point[] = [points[0]];
for (let i = 1; i < points.length; i++) {
const expandedPair = getExpandedPoints(points[i - 1], points[i], halfWidth);
polygonPoints.push(...expandedPair);
}
// 闭合多边形,回到起点
const firstPair = getExpandedPoints(points[points.length - 1], points[0], halfWidth);
polygonPoints.push(firstPair[0]); // 注意,这里我们只添加了第一个外扩点以闭合多边形,避免重复添加最后一个点
return polygonPoints;
}
接着进行下一个问题:
判断点位是否在多边形中
这个比较简单,就是循环遍历判断即可,上代码:
/**
* chatGPT 提供的算法
* @param point
* @param polygon
*/
function isPointInPolygon(point: Location, polygon: Location[]) {
let x = point.latitude; // 维度-x
let y = point.longitude; // 经度-y
let inside = false;
for (let i = 0, j = polygon.length - 1; i < polygon.length; j = i++) {
let xi = polygon[i].latitude;
let yi = polygon[i].longitude;
let xj = polygon[j].latitude;
let yj = polygon[j].longitude;
let intersect =
yi > y !== yj > y && x < ((xj - xi) * (y - yi)) / (yj - yi) + xi;
if (intersect) inside = !inside;
}
return inside;
}
好了,接着我们来解决第二个问题:
将重合的点位转换为面,传给高德api
检测到哪些摄像头点位和摄像头重合后,需要调用高德接口避让。我们需要将点转为面,以适应高德接口:
将摄像头扩展为一个具有面积的正方形
这个很简单,直接将以点位为中心,分别计算出左上、右上、右下、左下四个点位的坐标,得到一个正方形。代码如下:
/**
* 该函数接收一个point参数,返回一个包含四个对象的数组。
* 每个对象都有longitude和latitude属性,表示地理坐标。
* 函数根据给定的point,通过计算得到一个正方形区域的四个顶点坐标,
* 该正方形的边长为precision * 0.00001的一半。
* @param point
*/
const getPologyonFromPoint = (point: Location) => {
const precision = 10;
const diffGeo = (precision * 0.00001) / 2;
const { longitude, latitude } = point;
return [
{ longitude: longitude - diffGeo, latitude: latitude - diffGeo },
{ longitude: longitude + diffGeo, latitude: latitude + diffGeo },
{ longitude: longitude - diffGeo, latitude: latitude + diffGeo },
{ longitude: longitude + diffGeo, latitude: latitude - diffGeo },
];
};
以上,就是“北漂开车指南”这个开源小程序中,算法方面还算有些挑战的地方了,这里公开,主要是备忘,说不定一年后自己都看不懂了。
如果对您有帮助,欢迎加群讨论沟通